
LiDAR Sensor-based Obstacle Avoidance for Drone Outdoor Navigation
The project focuses on implementing drone obstacle avoidance using lidar sensor data. During autonomous navigation, the drone identifies obstacles along its path, promptly adjusting its course to navigate around them and ensure an unobstructed trajectory towards mission completion.
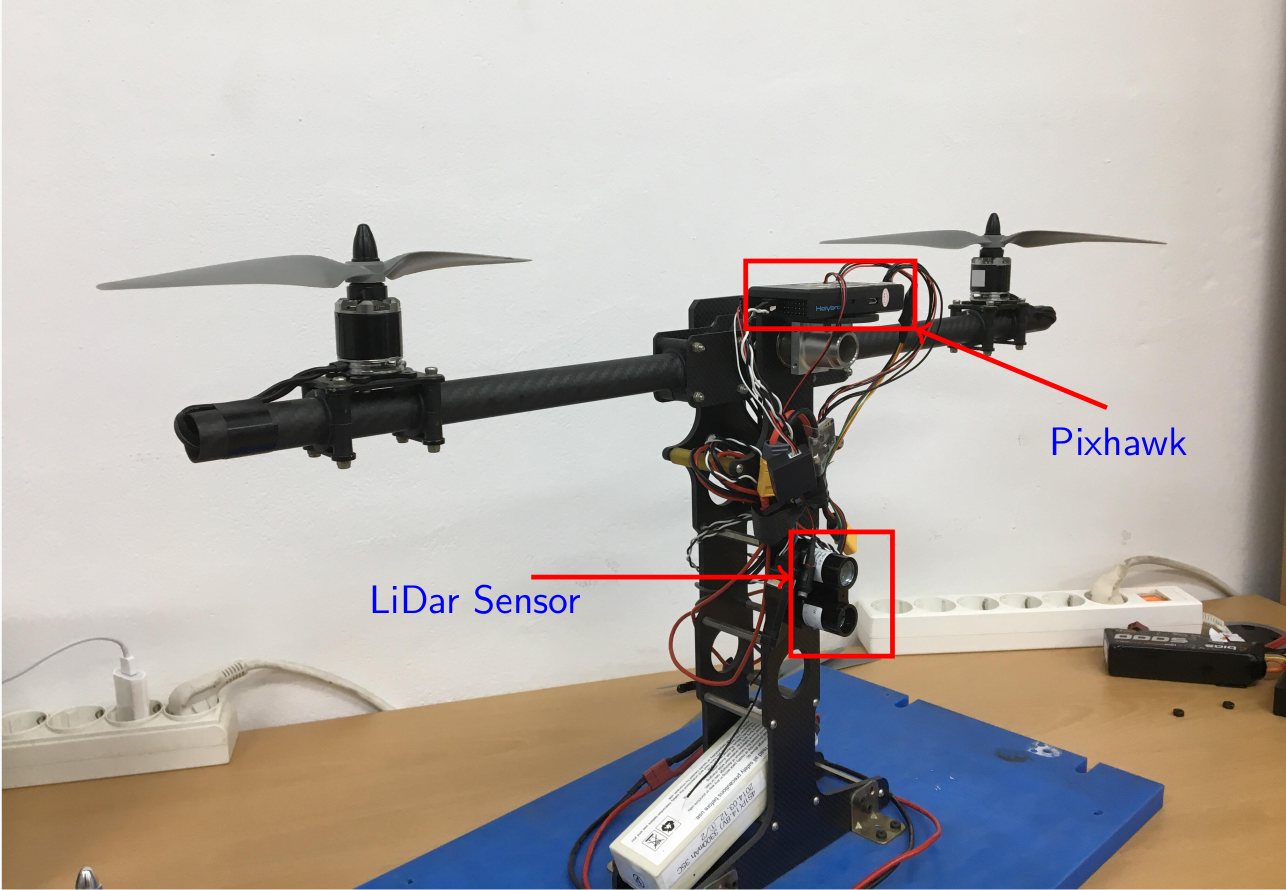
Experimental Setup
Source Codes
The last two commites on “obstacle-avoidance” branch of PX4-Autopilot repo shows the modification made in the PX4 code for this project implementation. Code
Results
